用于网联自动驾驶汽车的全尺寸模拟器
解决方案
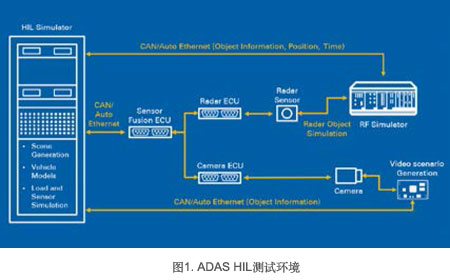
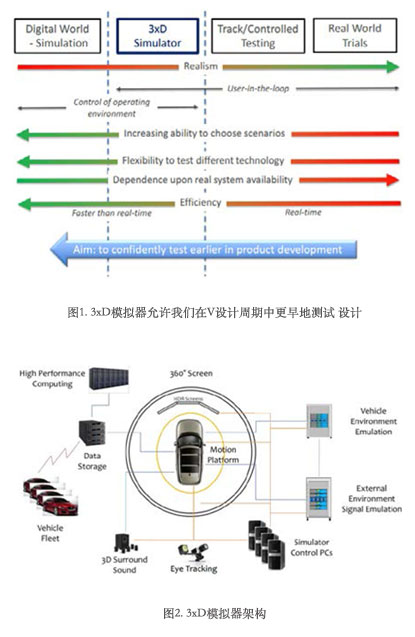
WMG专为智能汽车开发的3xD模拟器旨在提供一个创新平台,以弥合传统硬件在环(HIL)测试和基于道路的现场测试 之间的差距。模拟器提供了驶入式(drive-in)、驾驶员在环( driver-in-the-loop)、多轴驱动(multiaxis driving)体验,因 此称为3XD模拟
隔离
WMG 3xD模拟器安装在一个可以容纳整辆车的射频屏蔽室(法拉第笼)中。通过这种完全隔离,外部RF信号被阻挡在 外,从而允许模拟完整的RF环境、驾驶员的视觉环境以及车辆电子系统的其他感应系统。
我们希望为车辆和驾驶员的传感器提供完整的仿真,其中不仅包括雷达、激光雷达和场景生成
(视觉),还包括蓝 牙、4G、V2X,以及最重要的基于GNSS的位置信息。
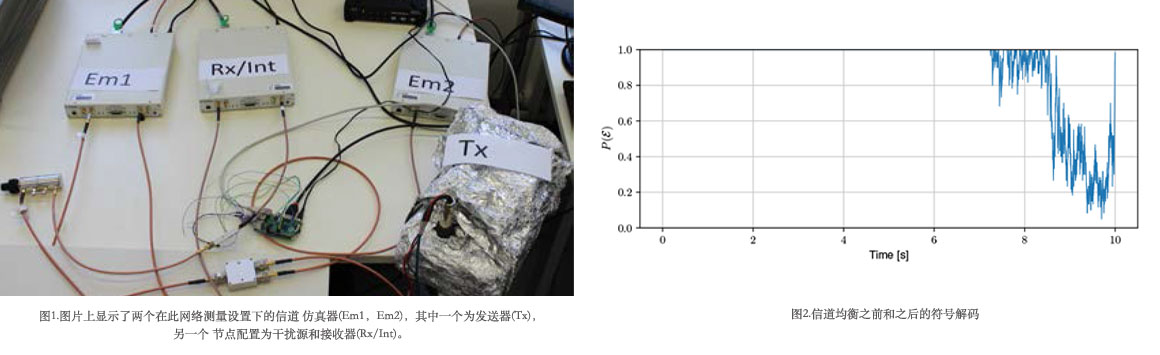
在模拟卫星星座提供位置信息(GNSS)时,测试工程师必须区分不同的环境。城市和市内高速公路驾驶环境会抑制不同 的信号特征,例如信号强度、反射和可见的卫星数量。
身临其境感
我们还有其他几种模拟器可以选择,但我们希望提供一种独一无二的工具,能够让驾驶员犹如身临其境地测试、验证和 确认新技术和整个系统。我们的目标不仅是生成车辆周边的场景(激励传感器),而且还要将其与RF环境(包括卫星信息) 相结合。这将使驾驶员能够完全沉浸在测试场景中,同时也可帮助车辆制造商在设计过程中更早地测试车辆,避免由 于后来发现的缺陷而引起代价高昂的设计变化。
结论
模拟器提供实时、安全、可控且可重复的物理环境,不仅可实现传感器和通信在环测试,而且还可 实现驾驶员在环测试。
这可以让工程师在安全、受控和可重复的环境中深入了解用户和系统(车辆)与环境的交互。例如,我们可以测试向汽车 音响系统添加噪声时驾驶员的反应,或者在城市环境中卫星信号丢失时车辆的反应。